
Dynamsoft Document Normalizer is a document scanning SDK that can be used to do edge detection, perspective correction, and contrast enhancement. Its C/C++ API is available on Windows and Linux. In this article, we will show you how to build a Python wrapper for Dynamsoft C/C++ Document Normalizer SDK, as well as how to quickly implement a document scanner with Python on Windows and Linux.
Python Wrapper for Dynamsoft C/C++ Document Normalizer SDK
Here we are not going to talk about how to build a Python C/C++ extension from scratch. If you are interested in this topic, you can refer to this article. Instead, we will focus on the C/C++ implementation of the Python wrapper for Dynamsoft C/C++ Document Normalizer SDK.
Customized PyObjects in C/C++
We define three native PyObjects, which will be interacted with Python code:
-
DynamsoftDocumentScanner: the native object that holds the pointer to the C/C++ Document Normalizer instance
typedef struct { PyObject_HEAD void *handler; PyObject *callback; WorkerThread *worker; } DynamsoftDocumentScanner; -
DocumentResult: the native object that holds the contour points of the detected document
typedef struct { PyObject_HEAD PyObject *confidence; PyObject *x1; PyObject *y1; PyObject *x2; PyObject *y2; PyObject *x3; PyObject *y3; PyObject *x4; PyObject *y4; } DocumentResult; -
NormalizedImage: the native object that holds the normalized image buffer
typedef struct { PyObject_HEAD PyObject *bytearray; PyObject *length; PyObject *width; PyObject *height; PyObject *stride; PyObject *format; NormalizedImageResult* normalizedResult; } NormalizedImage;
Methods Implementation
The DynamsoftDocumentScanner module contains following methods:
static PyMethodDef instance_methods[] = {
{"detectFile", detectFile, METH_VARARGS, NULL},
{"detectMat", detectMat, METH_VARARGS, NULL},
{"addAsyncListener", addAsyncListener, METH_VARARGS, NULL},
{"detectMatAsync", detectMatAsync, METH_VARARGS, NULL},
{"setParameters", setParameters, METH_VARARGS, NULL},
{"normalizeFile", normalizeFile, METH_VARARGS, NULL},
{"normalizeBuffer", normalizeBuffer, METH_VARARGS, NULL},
{NULL, NULL, 0, NULL}
};
-
detectFile: Detects the document in the image file and returns the contour points.
static PyObject *detectFile(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; char *pFileName; // File name if (!PyArg_ParseTuple(args, "s", &pFileName)) { return NULL; } DetectedQuadResultArray *pResults = NULL; int ret = DDN_DetectQuadFromFile(self->handler, pFileName, "", &pResults); if (ret) { printf("Detection error: %s\n", DC_GetErrorString(ret)); } PyObject *list = createPyList(pResults); // Release memory if (pResults != NULL) DDN_FreeDetectedQuadResultArray(&pResults); return list; } -
detectMat: Detects the document in the image buffer and returns the contour points.
static PyObject *detectMat(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; PyObject *o; if (!PyArg_ParseTuple(args, "O", &o)) return NULL; Py_buffer *view; int nd; PyObject *memoryview = PyMemoryView_FromObject(o); if (memoryview == NULL) { PyErr_Clear(); return NULL; } view = PyMemoryView_GET_BUFFER(memoryview); char *buffer = (char *)view->buf; nd = view->ndim; int len = view->len; int stride = view->strides[0]; int width = view->strides[0] / view->strides[1]; int height = len / stride; ImagePixelFormat format = IPF_RGB_888; if (width == stride) { format = IPF_GRAYSCALED; } else if (width * 3 == stride) { format = IPF_RGB_888; } else if (width * 4 == stride) { format = IPF_ARGB_8888; } ImageData data; data.bytes = (unsigned char *)buffer; data.width = width; data.height = height; data.stride = stride; data.format = format; data.bytesLength = len; DetectedQuadResultArray *pResults = NULL; int ret = DDN_DetectQuadFromBuffer(self->handler, &data, "", &pResults); if (ret) { printf("Detection error: %s\n", DC_GetErrorString(ret)); } PyObject *list = createPyList(pResults); // Release memory if (pResults != NULL) DDN_FreeDetectedQuadResultArray(&pResults); Py_DECREF(memoryview); return list; } -
addAsyncListeneranddetectMatAsync: Uses a native thread to run edge detection task asynchronously and returns the contour points.
static PyObject *addAsyncListener(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; PyObject *callback = NULL; if (!PyArg_ParseTuple(args, "O", &callback)) { return NULL; } if (!PyCallable_Check(callback)) { PyErr_SetString(PyExc_TypeError, "parameter must be callable"); return NULL; } else { Py_XINCREF(callback); /* Add a reference to new callback */ Py_XDECREF(self->callback); /* Dispose of previous callback */ self->callback = callback; } if (self->worker == NULL) { self->worker = new WorkerThread(); self->worker->running = true; self->worker->t = std::thread(&run, self); } return Py_BuildValue("i", 0); } static PyObject *detectMatAsync(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; PyObject *o; if (!PyArg_ParseTuple(args, "O", &o)) return NULL; Py_buffer *view; int nd; PyObject *memoryview = PyMemoryView_FromObject(o); if (memoryview == NULL) { PyErr_Clear(); return NULL; } view = PyMemoryView_GET_BUFFER(memoryview); char *buffer = (char *)view->buf; nd = view->ndim; int len = view->len; int stride = view->strides[0]; int width = view->strides[0] / view->strides[1]; int height = len / stride; ImagePixelFormat format = IPF_RGB_888; if (width == stride) { format = IPF_GRAYSCALED; } else if (width * 3 == stride) { format = IPF_RGB_888; } else if (width * 4 == stride) { format = IPF_ARGB_8888; } unsigned char *data = (unsigned char *)malloc(len); memcpy(data, buffer, len); std::unique_lock<std::mutex> lk(self->worker->m); if (self->worker->tasks.size() > 1) { std::queue<std::function<void()>> empty = {}; std::swap(self->worker->tasks, empty); } std::function<void()> task_function = std::bind(scan, self, data, width, height, stride, format, len); self->worker->tasks.push(task_function); self->worker->cv.notify_one(); lk.unlock(); Py_DECREF(memoryview); return Py_BuildValue("i", 0); } -
setParameters: Sets the parameters for the document scanner SDK.
static PyObject *setParameters(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; const char*params; if (!PyArg_ParseTuple(args, "s", ¶ms)) { return NULL; } char errorMsgBuffer[512]; int ret = DDN_InitRuntimeSettingsFromString(self->handler, params, errorMsgBuffer, 512); printf("Init runtime settings: %s\n", errorMsgBuffer); return Py_BuildValue("i", ret); } -
normalizeFile: Normalizes the document based on the contour points.
static PyObject *normalizeFile(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; char *pFileName; int x1, y1, x2, y2, x3, y3, x4, y4; if (!PyArg_ParseTuple(args, "siiiiiiii", &pFileName, &x1, &y1, &x2, &y2, &x3, &y3, &x4, &y4)) return NULL; Quadrilateral quad; quad.points[0].coordinate[0] = x1; quad.points[0].coordinate[1] = y1; quad.points[1].coordinate[0] = x2; quad.points[1].coordinate[1] = y2; quad.points[2].coordinate[0] = x3; quad.points[2].coordinate[1] = y3; quad.points[3].coordinate[0] = x4; quad.points[3].coordinate[1] = y4; NormalizedImageResult* normalizedResult = NULL; int errorCode = DDN_NormalizeFile(self->handler, pFileName, "", &quad, &normalizedResult); if (errorCode != DM_OK) printf("%s\r\n", DC_GetErrorString(errorCode)); PyObject *normalizedImage = createNormalizedImage(normalizedResult); return normalizedImage; } -
normalizeBuffer: Normalizes the document based on the contour points.
static PyObject *normalizeBuffer(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; PyObject *o; int x1, y1, x2, y2, x3, y3, x4, y4; if (!PyArg_ParseTuple(args, "Oiiiiiiii", &o, &x1, &y1, &x2, &y2, &x3, &y3, &x4, &y4)) return NULL; Py_buffer *view; int nd; PyObject *memoryview = PyMemoryView_FromObject(o); if (memoryview == NULL) { PyErr_Clear(); return NULL; } view = PyMemoryView_GET_BUFFER(memoryview); char *buffer = (char *)view->buf; nd = view->ndim; int len = view->len; int stride = view->strides[0]; int width = view->strides[0] / view->strides[1]; int height = len / stride; ImagePixelFormat format = IPF_RGB_888; if (width == stride) { format = IPF_GRAYSCALED; } else if (width * 3 == stride) { format = IPF_RGB_888; } else if (width * 4 == stride) { format = IPF_ARGB_8888; } ImageData data; data.bytes = (unsigned char *)buffer; data.width = width; data.height = height; data.stride = stride; data.format = format; data.bytesLength = len; Quadrilateral quad; quad.points[0].coordinate[0] = x1; quad.points[0].coordinate[1] = y1; quad.points[1].coordinate[0] = x2; quad.points[1].coordinate[1] = y2; quad.points[2].coordinate[0] = x3; quad.points[2].coordinate[1] = y3; quad.points[3].coordinate[0] = x4; quad.points[3].coordinate[1] = y4; NormalizedImageResult* normalizedResult = NULL; int errorCode = DDN_NormalizeBuffer(self->handler, &data, "", &quad, &normalizedResult); if (errorCode != DM_OK) printf("%s\r\n", DC_GetErrorString(errorCode)); PyObject *normalizedImage = createNormalizedImage(normalizedResult); Py_DECREF(memoryview); return normalizedImage; }
The NormalizedImage module contains two methods: save() and recycle(). Since the object holds the pointer of the native image data, the recycle() method must be called when the NormalizedImage object is no more used.
static PyMethodDef ni_instance_methods[] = {
{"save", save, METH_VARARGS, NULL},
{"recycle", recycle, METH_VARARGS, NULL},
{NULL, NULL, 0, NULL}
};
static PyObject *save(PyObject *obj, PyObject *args)
{
NormalizedImage *self = (NormalizedImage *)obj;
char *pFileName; // File name
if (!PyArg_ParseTuple(args, "s", &pFileName))
{
return NULL;
}
if (self->normalizedResult)
{
DDN_SaveImageDataToFile(self->normalizedResult->image, pFileName);
printf("Save image to file: %s\n", pFileName);
return Py_BuildValue("i", 0);
}
return Py_BuildValue("i", -1);
}
static PyObject *recycle(PyObject *obj, PyObject *args)
{
NormalizedImage *self = (NormalizedImage *)obj;
if (self->normalizedResult)
{
DDN_FreeNormalizedImageResult(&self->normalizedResult);
self->normalizedResult = NULL;
}
return Py_BuildValue("i", 0);
}
Download the Package from PyPI
The document-scanner-sdk package is available on https://pypi.org/project/document-scanner-sdk/.
Get a 30-Day Free Trial License
To activate the SDK, you need to get a 30-day free trial license from the online portal.

Python Document Scanner
Install OpenCV and Document Scanner SDK:
pip install opencv-python document-scanner-sdk
The OpenCV package depends on NumPy, which will be installed along with it.
Scan Documents from Image Files
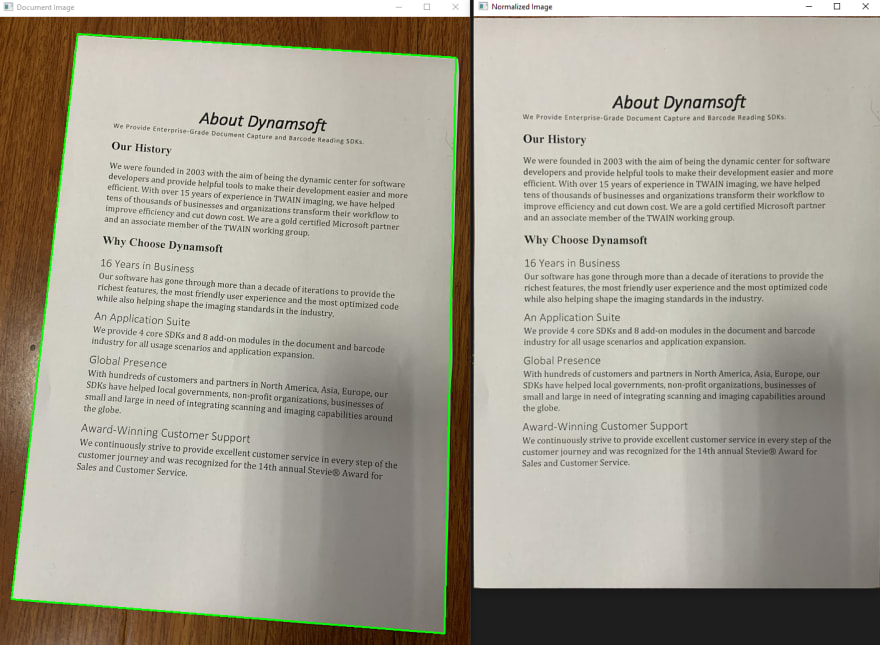
Let's get started with a simple example. The following code snippet shows how to use the SDK to scan a document from an image file.
from time import sleep
import docscanner
import numpy as np
import cv2
import time
def showNormalizedImage(name, normalized_image):
mat = docscanner.convertNormalizedImage2Mat(normalized_image)
cv2.imshow(name, mat)
return mat
docscanner.initLicense("DLS2eyJoYW5kc2hha2VDb2RlIjoiMjAwMDAxLTE2NDk4Mjk3OTI2MzUiLCJvcmdhbml6YXRpb25JRCI6IjIwMDAwMSIsInNlc3Npb25QYXNzd29yZCI6IndTcGR6Vm05WDJrcEQ5YUoifQ==")
scanner = docscanner.createInstance()
ret = scanner.setParameters(docscanner.Templates.color)
image = cv2.imread("images/1.png")
results = scanner.detectMat(image)
for result in results:
x1 = result.x1
y1 = result.y1
x2 = result.x2
y2 = result.y2
x3 = result.x3
y3 = result.y3
x4 = result.x4
y4 = result.y4
normalized_image = scanner.normalizeBuffer(image, x1, y1, x2, y2, x3, y3, x4, y4)
normalized_image.recycle()
showNormalizedImage("Normalized Image", normalized_image)
cv2.drawContours(image, [np.int0([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2)
cv2.imshow('Document Image', image)
cv2.waitKey(0)
Scan Documents from Camera
Now, we move to the camera example with detailed steps.
We utilize OpenCV's video I/O API to capture and show camera video stream:
import cv2
cap = cv2.VideoCapture(0)
while True:
ret, image = cap.read()
ch = cv2.waitKey(1)
if ch == 27:
break
cv2.imshow('Document Scanner', image)
Initialize the document scanner with a valid license key:
import docscanner
docscanner.initLicense("DLS2eyJoYW5kc2hha2VDb2RlIjoiMjAwMDAxLTE2NDk4Mjk3OTI2MzUiLCJvcmdhbml6YXRpb25JRCI6IjIwMDAwMSIsInNlc3Npb25QYXNzd29yZCI6IndTcGR6Vm05WDJrcEQ5YUoifQ==")
scanner = docscanner.createInstance()
You can select a built-in template to set the output type of a normalized document: binary, grayscale, or color.
scanner.setParameters(docscanner.Templates.color)
The template can be customized by referring to the template documentation. A more complicated parameter template looks like this:
{
"GlobalParameter":{
"Name":"GP",
"MaxTotalImageDimension":0
},
"ImageParameterArray":[
{
"Name":"IP-1",
"RegionPredetectionModes":[
{
"Mode": "RPM_GENERAL"
}
],
"Timeout": 10000,
"ColourChannelUsageType": "CCUT_AUTO",
"MaxThreadCount": 4,
"ScaleDownThreshold": 2300,
"ColourConversionModes":[
{
"Mode": "CICM_GENERAL",
"BlueChannelWeight": -1,
"GreenChannelWeight": -1,
"RedChannelWeight": -1
}
],
"GrayscaleTransformationModes":[
{
"Mode": "GTM_ORIGINAL"
}
],
"GrayscaleEnhancementModes": [
{
"Mode": "GEM_GENERAL"
}
],
"BinarizationModes":[
{
"Mode": "BM_LOCAL_BLOCK",
"BlockSizeX": 0,
"BlockSizeY": 0,
"EnableFillBinaryVacancy": 0,
"MorphOperation": "Close",
"MorphShape": "Rectangle",
"MorphOperationKernelSizeX": -1,
"MorphOperationKernelSizeY": -1,
"ThresholdCompensation": 10
}
],
"TextureDetectionModes":[
{
"Mode": "TDM_GENERAL_WIDTH_CONCENTRATION",
"Sensitivity": 5
}
],
"TextFilterModes": [
{
"Mode": "TFM_GENERAL_CONTOUR",
"IfEraseTextZone": 0,
"MinImageDimension": 65536,
"Sensitivity": 0
}
],
"LineExtractionModes": [
{
"Mode": "LEM_GENERAL"
}
],
"NormalizerParameterName":"NP-1",
"BaseImageParameterName":""
}
],
"NormalizerParameterArray":[
{
"Name":"NP-1",
"ContentType": "CT_DOCUMENT",
"InteriorAngleRangeArray": [
{
"MinValue": 70,
"MaxValue": 110
}
],
"QuadrilateralDetectionModes": [
{
"Mode": "QDM_GENERAL"
}
],
"DeskewMode": {
"Mode": "DM_PERSPECTIVE_CORRECTION",
"ContentDirection": 0
},
"PageSize": [-1, -1],
"ColourMode": "ICM_BINARY",
"Brightness": 0,
"Contrast": 0
}
]
}
In live camera scenarios, all CPU-intensive tasks, such as document edge detection, should be executed in a separate thread to avoid blocking the main thread. Therefore, we register a callback function to a native thread and call the asynchronous detection method to queue the detection tasks that will be consumed by the native thread:
g_results = None
g_normalized_images = []
index = 0
def callback(results):
global g_results
g_results = results
def process_video(scanner):
global g_normalized_images, index
scanner.addAsyncListener(callback)
cap = cv2.VideoCapture(0)
while True:
ret, image = cap.read()
ch = cv2.waitKey(1)
if ch == 27:
break
if image is not None:
scanner.detectMatAsync(image)
if g_results != None:
for result in g_results:
x1 = result.x1
y1 = result.y1
x2 = result.x2
y2 = result.y2
x3 = result.x3
y3 = result.y3
x4 = result.x4
y4 = result.y4
cv2.drawContours(image, [np.int0([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2)
cv2.imshow('Document Scanner', image)
So far, the real-time document edge detection function has been implemented. To crop the document based on the contour points and take a further step to normalize the document, we need to call the normalizeBuffer method:
def showNormalizedImage(name, normalized_image):
mat = docscanner.convertNormalizedImage2Mat(normalized_image)
cv2.imshow(name, mat)
return mat
if ch == ord('n'): # normalize image
if g_results != None:
if len(g_results) > 0:
for result in g_results:
x1 = result.x1
y1 = result.y1
x2 = result.x2
y2 = result.y2
x3 = result.x3
y3 = result.y3
x4 = result.x4
y4 = result.y4
normalized_image = scanner.normalizeBuffer(image, x1, y1, x2, y2, x3, y3, x4, y4)
g_normalized_images.append((str(index), normalized_image))
showNormalizedImage(str(index), normalized_image)
index += 1
else:
print('No document found')
If you are satisfied with the result, you can save the normalized image to a file:
if ch == ord('s'): # save image
if len(g_normalized_images) > 0:
for data in g_normalized_images:
cv2.destroyWindow(data[0])
data[1].save(str(time.time()) + '.png')
print('Image saved')
data[1].recycle()
g_normalized_images = []
index = 0
Finally, let's run the Python document scanner app in the terminal.



















